收藏此帖
收藏此帖| 会员注册 | 二级域名申请 | 我能做什么? | 网站说明书 | 协议书下载 | 广告预定 | 企业邮局 | 标准库 | 关于我们 |
|
| 技术交流首页 | 登录 | 用户注册 | 今日新帖 | 搜索 | 我的收藏夹 | 插件: 万年历 | 杭州公交线路查询 |
| 您当前的位置: 气体分离设备商务网 → 技术交流 --> 低温液体储罐、罐车及真空 --> 帖子:“自动调零伺服倾角传感器的设计与实现” |
| 收藏此帖 |
| 帖子主题:自动调零伺服倾角传感器的设计与实现 |
|
|||
一、引言
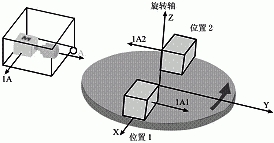
倾角传感器是测量关于水平面的倾斜角的装置,在土木建筑、水文地质、兵器、航空航天、生物医学等工程技术领域有着广泛的用途。倾角传感器种类繁多,按照其工作原理可以分为“固体摆”式,“液体摆”式,“气体摆”式三种倾角传感器。对于固体摆式倾角传感器的研究已经比较成熟,且应用广泛,但其易受外界干扰,如机械振动冲击;而液体摆式倾角传感器具有灵敏度高、耐腐蚀、耐潮湿等特点,但其致命的缺点是温度变化会严重影响其工作特性,从而限制了液体摆式倾角传感器的发展和应用;气体摆式倾角传感器结构简单,抗振动和抗冲击能力强,但其受环境温度影响较大,测试精度不高。总之,现有的倾角传感器的精度需要较高的成本来提高,并存在零位偏差,时间漂移和温度漂移等问题。 针对上述问题本文设计了一种基于自动调零理论的自动调零伺服倾角传感器,其基本思想源于木匠和建筑者使用的利用水泡尺旋转180°找平的古老方法,并采用步进电机及单片机控制技术设计和实现。这种自动调零伺服倾角传感器能很好的解决零位偏差,时间漂移和温度漂移等问题,使倾角传感器的性能得到了提高,具有非常重要的应用价值。 二、理论基础 自动调零伺服倾角传感器是设计用来校正各种来源的零位偏差和漂移。其基本思想来源于木匠和建筑者使用的利用水泡尺在被测物体表面旋转180o来找平的古老方法。如果水泡显示了相同的结果就表示工作正常,否则就指示一个等于水泡顶点位置差额的一半的错误。在本文的应用中,伺服倾角传感器位于一个输入轴IA平行于其表面的旋转圆盘上,当要执行偏移校正操作时可以直接旋转180o到圆盘的相反位置上,如图1所示。 图1伺服倾角计的零位偏差不依赖于传感器的位置。因此,当附于水平旋转圆盘上的传感器转到两个不同位置时,其输出将不会改变。
图1 伺服倾角计的零位偏差不依赖于传感器的位置 倾角传感器在零输入(倾角传感器的底座位于绝对水平的表面上)时的输出由两部分组成: (1)偏移误差VB定义为不依赖于倾角传感器位置的输出。 (2)未对准误差角e主要是由于倾角传感器的底座没有与测量轴线绝对平行而造成的。这样就引起了一个与未对准角度成比例的输出电压Ve(对于很小的角度来说,sine≈e)。 如果图1中的旋转底座在一个绝对水平的平面上,则很明显在两个位置上倾角传感器的偏移误差输出VB和未对准误差输出Ve的输出和为: Vo=VB+Ve (1) 假设旋转底座相对于Y轴倾斜了角度φ,则分析过程如下,如图2所示。
图2 在直径相对位置旋转传感器将产生相等的电磁场和相反的极性 很明显图2所示的旋转传感器时,角度φ在这两个位置是相同的。显然输入轴线的方向是相反的,这样输出电压的Vφ极性也相反。在位置1和位置2电压输出是重叠的:
一般来说,从等式中可以看出偏移误差和未对准误差是可以完全消除,从而可以得到真实的角度。事实上,这就是自动调零的作用。要把这些理论应用于实践,以下的基本条件必须满足:
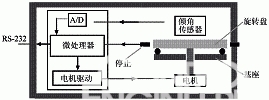
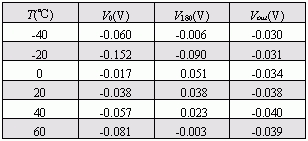
图3 自动调零伺服倾角传感器设计结构图 四、试验结果 表1 零位温度试验结果(1V/°)
然后对结果进行修正,用于对数据进行分析,修正后的结果如表2所示。可以得到温度变化-输出变化特性图,如图4所示。可以看出,在低温-40℃到高温60℃的温度范围内,内部倾角传感器的输出V0具有最大为0.135V的温度灵敏性。而当经过偏移校正后,倾角传感器的输出Vout具有最大为0.01V的温度灵敏性。也就是说此倾角传感器的零位温度系数小于0.0001°/℃,其调零精度达到0.01°,达到了自动调零的目的,能够满足测试设备的要求。 表2 修正后的结果
图4 零位温度试验的输出变化特性图
2. 零位重复性试验 表3 零位重复性实验记录表
3. 误差分析试验 常温20℃,在-10°~10°范围内对倾角传感器进行测试,分别记录V0、V180和Vout。根据测的数据可以得到此倾角传感器的在20℃时的线性图如图5。
图5 室温20°传感器输出线性图 根据以上测得的数据可以计算出此倾角传感器输出Vout在全量程范围内的非线性误差为0.02°,能够满足测试设备的要求。 4. 振动试验 表4 振动试验技术条件
表5 振动试验数据
经过对以上数据的分析,画出Vout在振动前后的对比图如图6所示。从图中可以看出自动调零伺服倾角传感器具有良好的抗振动和抗冲击性能,能够满足测试设备的要求。
图6 输出Vout在振动前后的对比图 5. 连续工作试验
图7 连续工作试验输出变化图 五、试验结果 |
|
|
| Copyright©2001版权所有_杭州汉皇网络科技有限公司 联系我们:webmaster@cngspw.com 浙ICP备10209442号-1 ICP经营许可证 浙B2-20100450 |
| 服务热线:0571-85065806 传真:0571-85065896 地址:杭州下城区高新技术产业基地电子商务园区费家塘路588号4号楼402-403室 |
| 主办单位:杭州汉皇网络科技有限公司 本网站法律顾问:汪卓君律师(浙江杭天信律师事务所) |
| cngspw.com(hangzhou_china),Ltd;Allrights Reserved 版权声明 |
execute:146.484